온도조절 모듈
1) Q64TCTT, Q64TCRT
- Q64TCTT, Q64TCRT는 외부의 온도 센서로부터의 입력값을 16비트 부호 BIN(바이너리) 데이터로 변환하고, 목표 온도가 되도록 PID연산을 실시하여 트랜지스터 출력으로 외부로 출력하는 온도조절을 목적으로 한 모듈입니다.
- Q64TCTT, Q64TCRT에서는 PID연산을 하기 위한 비례대(P), 적분시간(I), 미분시간(D)을 오토 튜닝 기능으로 자동 설정할 수 있습니다.
- Q64TCTT에는 K, J, T, B, S, E, R, N, U, L, PL, II, W5Re/W26Re 타입의 열전대를 접속할 수 있습니다. 또한 Q64TCRT에는 Pt100, JPt100타입의 백금측온저항체를 접속할 수 있습니다.

2) Q64TCTTBW, Q64TCRTBW
- Q64TCTTBW, Q64TCRTBW는 Q64TCTT, Q64TCRT에 외부의 전류 센서로부터의 입력을 기초로 히터 단선 검출을 실시하는 기능을 갖게한 모듈입니다.

3) PID제어
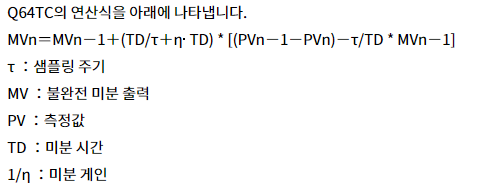
- Q64TC에서는 측정값 불완전 미분형 PID제어를 실시할 수 있습니다.
측정값 불완전 미분형 PID제어는 미분 동작의 입력에 일차 지연 필터를 넣어, 고주파 노이즈 성분을 제거하여 편차(E)에 대해서 PID연산을 실시하는 방식입니다

Q64TC의 연산식을 아래에 나타냅니다. .
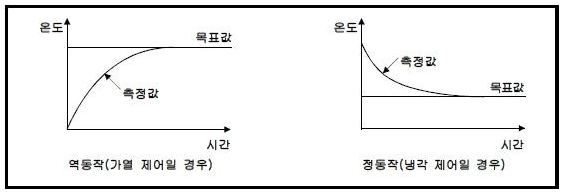
Q64TC는 역동작과 정동작에 의해 PID연산을 실시합니다.
- 역동작: 역동작은 조작량(MV)이 증가하면 측정값(PV)이 증가하여 목표값(SV)에 가까워지는 동작입니다. 역동작은 가열제어를 할경우에 유요합니다.
- 정동작: 정동작은 조작량(MV)가 증가하면 측정값(PV)이 감소하여 목표값(SV)에 가까워지는 동작입니다. 정동작은 냉각제어를 할 경우에 유효합니다.
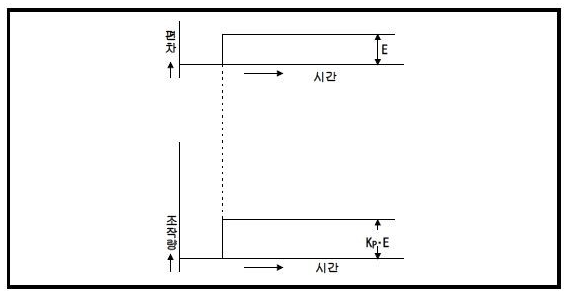
비례동작(P동작) : 비례동작은 편차(목표값과 측정값과의 차이)에 비례한 조작량을 알 수 있는 동작입니다. 조작량은 -5.0~105.0%까지의 사이를 변화합니다. 비례 동작에서는 옵셋(잔류편차)이 발생합니다.
적분동작(I동작): 적분동작은 편차가 발생했을 때, 그 편차를 없애도록 연속적으로 조작량을 변화시키는 동작입니다. 비례 동작에서 발생한 옵셋을 없앨 수 있습니다.
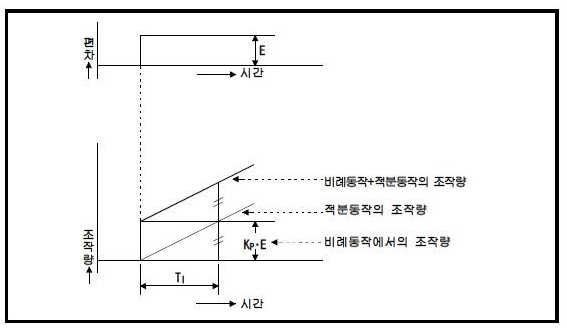
미분동작(D동작): 미분동작은 편차를 발생했을 때, 편차를 없애도록 변화속도에 비레한 조작량을 늘리는 동작입니다. 미분 동작에서는 외란 등에 의해 제어 대상이 크게 변동하는 것을 막을 수 있습니다.

PID동작은 비례동작 + 적분동작+ 미분동작에 의해 산출한 조작량으로 제어를 합니다.

4) 입출력 신호
Q64TC는 PLC CPU와의 신호 교신에 입력 16점, 출력 16점을 사용하고 있습니다.

5) 주요 버퍼메모리
소수점위치(버퍼메모리 어드레스: 1H~4H)
경보발생내용(버퍼메모리 어드레스: 5H~8H)
온도측정값(PV값, 버퍼메모리 어드레스: 9H~CH)
조작량(MV값, 버퍼메모리 어드레스: DH~10H)
입력범위(버퍼메모리 어드레스: 20H, 40H, 60H, 80H)
목표값(SV)설정(버퍼메모리 어드레스: 22H, 42H, 62H, 82H)
PID정수 설정(버퍼메모리 어드레스: 23H~25H, 43H~45H,63H~65H, 83H~85H)
경보알람 1~4의 설정(버퍼메모리 어드레스: 2AH, 2BH, 4AH, 4BH, 6AH, 6BH, 8AH, 8BH)
상하한 출력 리미터 설정(버퍼메모리 어드레스: 2AH, 2BH, 4AH, 4BH, 6AH, 6BH, 8AH, 8BH)
제어응답 파라미터 설정(버퍼메모리 어드레스 31H, 51H, 71H, 91H)
정동작/역동작 설정(버퍼메모리 어드레스: 36H,56H,76H,96H)
상하한 설정 리미터(버퍼메모리 어드레스: 37H, 38H, 57H,58H,77H,78H,97H,98H)
'PLC' 카테고리의 다른 글
| 스택 (Stack) 자료구조 이해하기 (0) | 2020.03.09 |
|---|---|
| [36] 정보 유니트 (0) | 2020.03.06 |
| PID제어 개념 (0) | 2020.03.05 |
| [34] 아날로그 출력모듈 (0) | 2020.03.01 |
| [33] 아날로그 유니트 (0) | 2020.02.25 |