Q71E71 Ethernet 모듈
Ethernet유닛 <> PC간 연결
Q71E71 Ethernet 모듈
Ethernet유닛 <> PC간 연결
1. QJ71E71 ETHERNET 모듈
Ethernet 인터페이스 모듈 개요
MELSEC-Q 시리즈의 QJ71E71형 Ethernet 인터페이스 모듈은 Q시리즈 PLC를 Ethernet (10BASE5, 10BASE2, 10BASE-T)의 TCP/IP, UDP/IP 통신 프로토콜을 이용하여 PC나 워크스테이션 등의 상위 시스템 및 PLC간을 접속하기 위한 PLC측 인터페이스 모듈입니다.
(1) MELSEC 커뮤니케이션 프로토콜에 의한 교신
MELSEC 커뮤니케이션 프로토콜(이하, MC프로토콜 이라고 약칭합니다) 에 의한 교신 에서는 상위 시스템에서 PLC의 디바이스 데이터나 프로그램 파일을 읽기/쓰기 할 수 있습니다.
이 프로토콜은 모두 상위 시스템에서의 요구에 근거하여 데이터를 송수신하는 수동적인 프로토콜입니다. 회선 접속 후의 데이터 교신용 시퀀스 프로그램을 필요로 하지 않습니다.
별매의 통신지원 툴 (MX Component, MX Links, MX Chart, MX Sheet)을 사용함으로써, MC프로토콜 통신 프로그램을 작성할 수 있습니다. GX Works2의 PLC Ethernet접속도 MC프로토콜입니다.
고정 버퍼에 의한 교신
- PLC간 또는 PLC와 상위 시스템간에서 최대 1k워드분의 임의의 데이터를 송신 또는 수신할 수 있습니다. Ethernet모듈에는 1k워드의 고정 버퍼 데이터 영역이 16개 준비되어 있으며, 각각을 임의의 기기와 송신용 또는 수신용 버퍼로서 할당하여 사용합니다.
MC프로토콜에 의한 교신이 수동적인 교신인데 반해서 고정버퍼에 의한 교신은 능동적인 프로토콜입니다. 통상 우리가 Ethernet통신을 하는 교신방법입니다.

Ehternet Protocol 종류.
1) TCP(Transmission Control Protocol): 네트워크에 접속된 PC/워크슽이션, PLC사이의 교신으로 데이터의 신뢰성 혹은 확실성을 보증하는 프로토콜입니다. 커넥션(논리회선)을 확립함으로써, 논리 접속을 실행하고, 마치 상대기기간에 하나의 전용회선이 확립되어 있는 것처럼 됩니다. Ethernet모듈에서는 커넥션을 최대 16개까지 확립할 수 있으며, 복수의 버퍼 동시 통신이 가능합니다.
2) UDP(User Datagram Protocol): 네트워크에 접속된 PC/워크스테이션, PLC간의 교신에서 데이터의 신뢰성, 확실성이 보증되지 않은 프로토콜입니다. 따라서 상대 노드에 데이터가 도달하지 않는 경우라도 재송신은 실행할 수 없습니다. 커넥션 없이 통신하므로 고속통신이 가능합니다.
3) IP (Internet Protocol): 데이터그램 형식으로 통신 데이터를 송수신합니다. 통신 데이터의 분할, 조합 기능이 있습니다.
4) FTP(File Transfer Protocol): 파일을 전송하기 위한 프로토콜입니다. PLC CPU의 파일을 업로드, 다운로드 할 수 있습니다.
5) DNS(Domain Name System): IP어드레스를 사용자가 기억하기 쉬운 명칭으로 번역하는 시스템입니다. 기타, ARP(Address Resolution Protocol), ICMP(Internet Control Message Protocol), SMTP(Simple Mail Transfer Protocol), POP3(Post Office Protocol Ver3) 등이 있습니다.
Ethernet 유닛 전용 명령
- 이하에서 고정 버퍼에 의한 교신만 설명합니다. 고정 버퍼에 의한 교신에 사용하는 전용 명령만 살펴 보겠습니다.
BUFRCV: 고정 버퍼 교신으로 수신데이터를 익는다.
BUFSND: 고정버퍼를 사용하여 상대기기에 데이터를 송신한다.
OPEN: 커넥션을 오픈한다.
CLOSE: 커넥션을 클로즈한다.
ERRRD: 에러정보를 읽는다.
ERRCLR: 에러를 클리어 한다
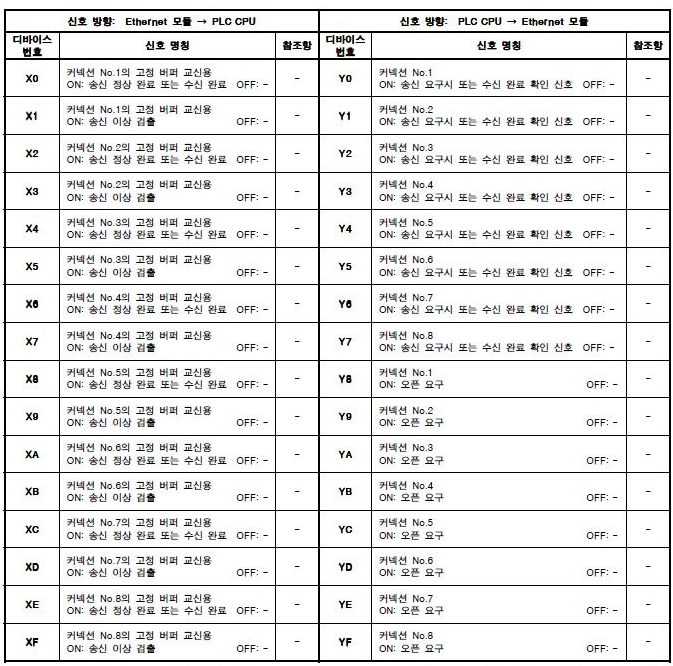
Ethernet 유닛 입/출력 상세

Ethernet 유닛 주요 버퍼 메모리

Ethernet 유닛 <> PC 간 연결
모듈통신시 주의사항
(1) 모듈의 버퍼 메모리 중에서 [시스템영역] 에 데이터를 쓰지 마십시오.
(2) 출력 신호중에서 [사용금지] 의 신호를 출력(ON)하지 마십시오.
(3)상대기기에서 PLC CPU에 대한 상태제어(리모트 RUN/STOP등)를 실행할 때는 사용자가 사전에 설정하는 파라메터에서 [항상OPEN대기]를 선택하십시오. (작동설정 중에 초기화 타이밍 설정에서 선택합니다) [OPEN대기로 하지않는다] 를 선택할 때는 리모트 STOP시 통신회선이 클로즈됩니다. 이후는 PLC CPU측에서 다시 오픈할 수 없으며, 상대 기기에서의 리모트 RUN기동도 할 수 없습니다.
(4) 기존의 Ethernet모듈에서 작성한 시퀀스 프로그램을 유용할 경우에는, 오픈 요구신호(Y8~YF)및 고정 버퍼 송수신신호(Y0~Y7)의 ON/OFF프로그램과 전용 명령의 OPEN, CLOSE, BUFSND, BUFRCV를 동일 커넥션에 대해 병용하지 마십시오. 오작동의 원인이 됩니다.
(5) Ethernet모듈을 교환할 경우에는 상대기기도 리세트 하십시오. (상대기기가 교신 상대의 Ethernet 어드레스를 유지하는 경우, Ethernet 모듈의 교환으로 Ethernet 어드레스가 변경되기 때문에 게속 교신이 안될 경우가 있습니다.) 또, 상대기기(PC등)를 교환한 경우도 Ethernet 모듈을 재기동 하십시오.
Ethernet 모듈 TEST 환경

| OSI 7계층 (0) | 2020.03.09 |
|---|---|
| 스택 (Stack) 자료구조 이해하기 (0) | 2020.03.09 |
| [35] 아날로그 유니트 (0) | 2020.03.06 |
| PID제어 개념 (0) | 2020.03.05 |
| [34] 아날로그 출력모듈 (0) | 2020.03.01 |
온도조절 모듈
1) Q64TCTT, Q64TCRT
- Q64TCTT, Q64TCRT는 외부의 온도 센서로부터의 입력값을 16비트 부호 BIN(바이너리) 데이터로 변환하고, 목표 온도가 되도록 PID연산을 실시하여 트랜지스터 출력으로 외부로 출력하는 온도조절을 목적으로 한 모듈입니다.
- Q64TCTT, Q64TCRT에서는 PID연산을 하기 위한 비례대(P), 적분시간(I), 미분시간(D)을 오토 튜닝 기능으로 자동 설정할 수 있습니다.
- Q64TCTT에는 K, J, T, B, S, E, R, N, U, L, PL, II, W5Re/W26Re 타입의 열전대를 접속할 수 있습니다. 또한 Q64TCRT에는 Pt100, JPt100타입의 백금측온저항체를 접속할 수 있습니다.

2) Q64TCTTBW, Q64TCRTBW
- Q64TCTTBW, Q64TCRTBW는 Q64TCTT, Q64TCRT에 외부의 전류 센서로부터의 입력을 기초로 히터 단선 검출을 실시하는 기능을 갖게한 모듈입니다.

3) PID제어
- Q64TC에서는 측정값 불완전 미분형 PID제어를 실시할 수 있습니다.
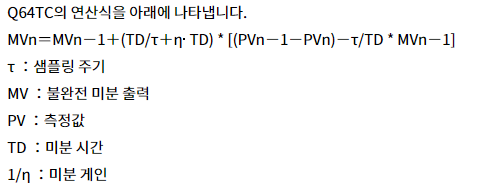
측정값 불완전 미분형 PID제어는 미분 동작의 입력에 일차 지연 필터를 넣어, 고주파 노이즈 성분을 제거하여 편차(E)에 대해서 PID연산을 실시하는 방식입니다

Q64TC의 연산식을 아래에 나타냅니다. .
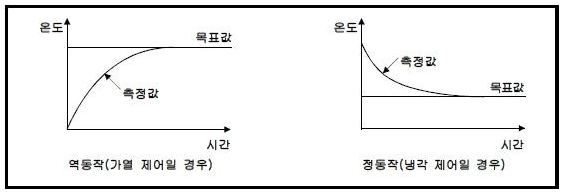
Q64TC는 역동작과 정동작에 의해 PID연산을 실시합니다.
- 역동작: 역동작은 조작량(MV)이 증가하면 측정값(PV)이 증가하여 목표값(SV)에 가까워지는 동작입니다. 역동작은 가열제어를 할경우에 유요합니다.
- 정동작: 정동작은 조작량(MV)가 증가하면 측정값(PV)이 감소하여 목표값(SV)에 가까워지는 동작입니다. 정동작은 냉각제어를 할 경우에 유효합니다.
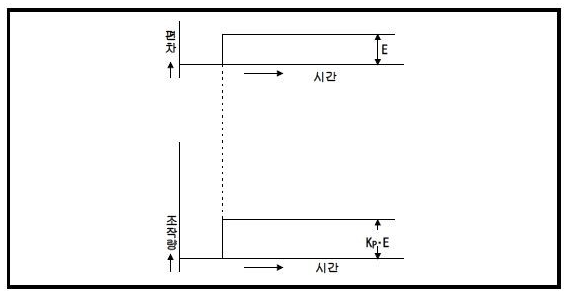
비례동작(P동작) : 비례동작은 편차(목표값과 측정값과의 차이)에 비례한 조작량을 알 수 있는 동작입니다. 조작량은 -5.0~105.0%까지의 사이를 변화합니다. 비례 동작에서는 옵셋(잔류편차)이 발생합니다.
적분동작(I동작): 적분동작은 편차가 발생했을 때, 그 편차를 없애도록 연속적으로 조작량을 변화시키는 동작입니다. 비례 동작에서 발생한 옵셋을 없앨 수 있습니다.
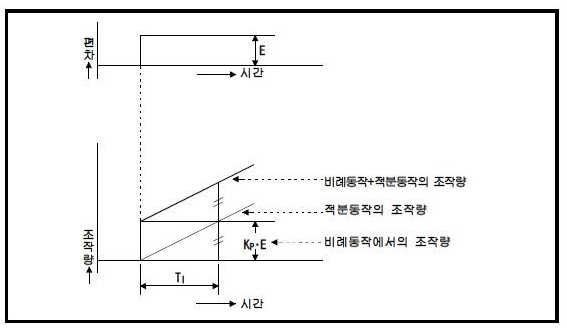
미분동작(D동작): 미분동작은 편차를 발생했을 때, 편차를 없애도록 변화속도에 비레한 조작량을 늘리는 동작입니다. 미분 동작에서는 외란 등에 의해 제어 대상이 크게 변동하는 것을 막을 수 있습니다.

PID동작은 비례동작 + 적분동작+ 미분동작에 의해 산출한 조작량으로 제어를 합니다.

4) 입출력 신호
Q64TC는 PLC CPU와의 신호 교신에 입력 16점, 출력 16점을 사용하고 있습니다.

5) 주요 버퍼메모리
소수점위치(버퍼메모리 어드레스: 1H~4H)
경보발생내용(버퍼메모리 어드레스: 5H~8H)
온도측정값(PV값, 버퍼메모리 어드레스: 9H~CH)
조작량(MV값, 버퍼메모리 어드레스: DH~10H)
입력범위(버퍼메모리 어드레스: 20H, 40H, 60H, 80H)
목표값(SV)설정(버퍼메모리 어드레스: 22H, 42H, 62H, 82H)
PID정수 설정(버퍼메모리 어드레스: 23H~25H, 43H~45H,63H~65H, 83H~85H)
경보알람 1~4의 설정(버퍼메모리 어드레스: 2AH, 2BH, 4AH, 4BH, 6AH, 6BH, 8AH, 8BH)
상하한 출력 리미터 설정(버퍼메모리 어드레스: 2AH, 2BH, 4AH, 4BH, 6AH, 6BH, 8AH, 8BH)
제어응답 파라미터 설정(버퍼메모리 어드레스 31H, 51H, 71H, 91H)
정동작/역동작 설정(버퍼메모리 어드레스: 36H,56H,76H,96H)
상하한 설정 리미터(버퍼메모리 어드레스: 37H, 38H, 57H,58H,77H,78H,97H,98H)
| 스택 (Stack) 자료구조 이해하기 (0) | 2020.03.09 |
|---|---|
| [36] 정보 유니트 (0) | 2020.03.06 |
| PID제어 개념 (0) | 2020.03.05 |
| [34] 아날로그 출력모듈 (0) | 2020.03.01 |
| [33] 아날로그 유니트 (0) | 2020.02.25 |
원하는 값에 도달하기 위한 기초적인 자동 피드백 제어 방법중 하나입니다.
PID제어를 위해서는 몇가지 요소에 대한 정의가 필요합니다.
e(t): 오차값이라 부르고, 목표값에서 현재값을 뺀 값입니다.
MV(t): 제어량이라 부르고, 현재값에서 목표값에 도달하기 위해 제어기에 줄 값을 의미합니다.
알고리즘은 다음과 같습니다.
MV(t) = Kp*e(t)+Ki* (integral)e(t)+Kd* (derivative)*e(t)

그래프를 참조하면 도움이 크게 됩니다.
P: Proportation 제어는 오차값만큼 제어량을 줍니다. 오차가 클수록 제어량이 크고, 오차가 적으면 제어량이 적습니다.
PID제어에 가장 큰 역할을 하고 목표값에 도달하는 속도 역시 괜찮은 편이지만, 목표값에 가까워지면 더 이상 목표값에 수렴하지 못하고, 어느정도 오차가 있는 상태에서 더이상 제어가 되지 않습니다. 이를 잔류편차가 생긴다고 합니다.
위의 P제어를 해결하기 위해 나온 제어방식이 Proportation 제어에 Integral-적분항을 추가해서 만든 PI제어 인것이죠.
PI제어는 오차의 비례값과 오차의 누적값을 제어량으로 사용해 P제어의 문제인 오차를 낮춥니다.
목표값에 정확히 수렴할 수 있도록 해주죠. 다만 이것도 문제가 있습니다.
도달하는데 시간이 너무 걸리고, 급격한 변화에 대응하기 어렵다는 것입니다.
마찬가지로 PI제어의 단점을 보완할 제어로 PID제어가 등장
기존PI제어에 Derivative 미분항을 추가해 급격한 변화에도 대응하고, 도달시간을 줄일 수 있습니다.
다만, PID 각각의 요소들이 제어기에 어떤 역할을 하고, 어떤 영향을 미치는지 이해하는데는 위 내용이 상당히 중요하게 다가올 것이기 때문에 굳이 언급하게 되었습니다.
위 내용을 숙지하고 알고리즘을 보면, 정체불명의 Kp, Ki, Kd가 있는 것을 보실겁니다.
위 값들은 PID제어가 적절히 이루어지도록 하는 상수값으로, 적절히 맞췄을 때 최적의 성능을 냅니다.
그러므로 세값들은 모두 찾아야 한다는 것
어렵게 느낄 수 있겠지만, 각 상수에는 자기들만의 성질이 있고, 그 성질을 힌트로 값을 찾아내면 됩니다.
Kp, p게인은 목표치에 가는 정도를 결정하는 상수입니다.
p게인이 너무 낮으면 목표값에 도달하기 어렵게 됩니다. 제어량이 충분치 않기 때문에, 시간도 오래걸리고, 제어에 어려움을 겪기도 합니다.
반대로 p게인이 너무 높으면 제어량이 너무 커서 진동하기 시작합니다. 시소를 탄다고하죠.
Ki, i게인은 목표치에 대한 정확도를 결정하는 상수입니다.
i게인이 너무 낮으면 위 설명처럼 목표치에 근접하기 어렵습니다.
반대로 i게인이 너무 높으면 시간이 오래걸리고, 외부 변화에 잘 대응하지 않습니다.
역동적인 움직임을 중시하는 드론 pid게인 값 설정에서는 특히 i게인 셋팅이 중요합니다.
Kd, d게인은 목표치에 대한 속도를 결정하는 상수입니다.
d게인은 p게인으로 조금 부족한 제어량을 보충해주는 역할을 합니다.
순간 제어량을 확 높이면서 목표치에 도달하는 도움닫기 역할 같은 거죠.
d게인이 너무 낮으면 마찬가지로 시간이 오래걸리고, d게인이 너무 크면 진동이 생깁니다.
| [36] 정보 유니트 (0) | 2020.03.06 |
|---|---|
| [35] 아날로그 유니트 (0) | 2020.03.06 |
| [34] 아날로그 출력모듈 (0) | 2020.03.01 |
| [33] 아날로그 유니트 (0) | 2020.02.25 |
| Isolator 절연변환기 (미완성) (0) | 2020.02.25 |
아트웍을 향상하는 다른 방법은 혼합모드를 적용하는 것입니다.
혼합모드는 오브젝트의 색상을 아래 오브젝트의 색상과 혼합하려는 경우 사용합니다.
혼합모드를 아트웍에 적용하면 아래에 있는 콘텐츠에서 혼합모드 효과를 볼 수 있습니다.

여기에 있는 원이 서로 겹쳐지면서 녹색이 더욱 진해집니다.
곱하기 라는 혼합모드를 각 원에 적용 했습니다.
위처럼 만들려면

초록색원을 선택한 뒤, 회전도구를 이용한다.
회전도구를 선택한 상태에서 원을 보면 가운데를 중심으로 회전한다는 것을 알 수 있다.
원을 여기 아래쪽에서 회전하여 복사본을 만들려고한다.

ALT 키를 눌러 원하는 위치에 클릭하면 위처럼 회전대화상자가 표시된다.
각도를 52도로 변경하고 복사본을 만들기 위해 복사를 클릭

새로 생성한 원의 색상을 변경하여 혼합모드의 작동원리를 살펴봅시다.
칠색상을 다른 컬러로 변경하고
이제 위에 있는 원의 색상을 아래 원의 칠 색상과 혼합하기 위해 혼합모드를 적용해보자
속성에서 불투명도 글자를 클릭하여 불투명도 패널을 엽니다.
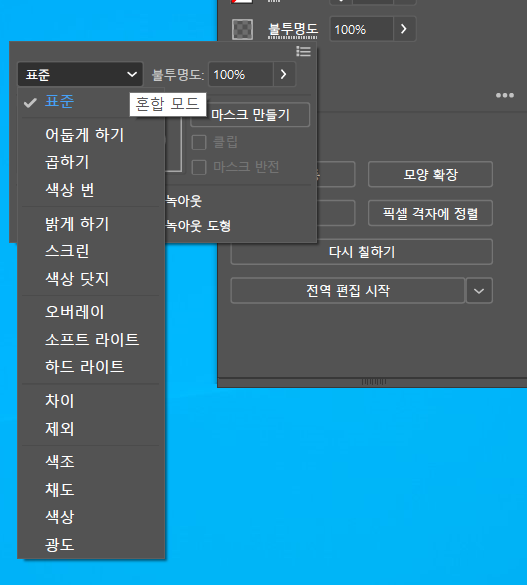
혼합모드를 클릭하여, 아트웍에 적용되는 방식에 따라 그룹별로 배열되어 있습니다..
예를들어, 어둡게 하기 모드는 어두운 영역을 강조하고 흰색은 전혀 표시하지 않습니다.

어둡게 하기 그룹에서 혼합모드는 선택된 콘텐츠 또는 아래 콘텐츠보다 더 어둡게 만듭니다.

밝게하기 혼합모드는 밝은 영역만 강조하고, 검은색을 표시하지 않습니다.
밝게하기 그룹의 혼합모드는 선택된 콘텐츠 또는 아래 콘텐츠보다 더 밝게 만듭니다.
밝게하기 혼합모드는 어두운 콘텐츠 배경에 밝은 콘텐츠를 혼합하려는 경우 매우 유용합니다.
곱하기를 선택하면 원이 배수로 겹쳐 표시되므로

색상이 더욱 어둡게 나타납니다.
선택한 혼합모드를 기반으로 색상이 혼합되는 것을 볼 수 있습니다.
로고를 마무리하기 위해 이 원을 더 복사하고 회전시킵니다.

이미 회전한 각도와 복사를 선택한 것이 있어, Ctrl + D로 복사를 합니다.

위와 똑같은 기능이다.
불투명도와 혼합모드를 한번에 적용할 수 있다.

위는 불투명도만 낮게 조절한 것이다.
로고를 마무리하기위해 나무를 모양으로 끌어옵니다.

다양한 색상과 혼합모드를 원에 적용하여 실험해보고, 원하는 결과를 만들어보자

| 일러스트 신속하게 패스 연결및 트리밍 (0) | 2020.03.20 |
|---|---|
| 로고제작 (0) | 2020.03.06 |
| 마스크를 사용하여 콘텐츠 자르기 (0) | 2020.03.03 |
| 자유롭게 아트웍 변형 (0) | 2020.03.03 |
| 다양한 방식으로 모양결합 (0) | 2020.03.03 |
마스크는 다른 콘텐츠의 일부를 숨기는데 사용하는 벡터모양입니다. 마스크로 사용될 이모양은 마스크를 적용할 콘텐츠 위에 배치해야 합니다.
마스크로 사용될 이 벡터 모양은 마스크를 적용할 콘텐츠 앞에 오도록 배치해야 합니다.

위처럼 만들기 위해서는 저 병모양 안에 초록색이 들어가야 하기 때문에
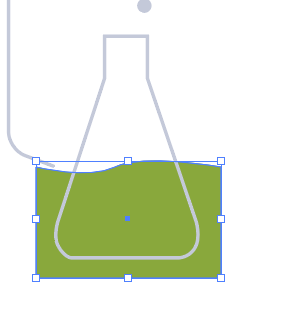
초록색이 병 뒤로 가야 병안에 초록색 액체가 들어간것 처럼 마스크가 적용이됨
반대로 거꾸로 하게되면
초록색 창이 위로 오기 때문에 초록색 창 틀에 맞춰져서

위처럼 화면이 표시된다.
이제 플라스크와 녹색모양은 클립그룹이라는 특별한 그룹에 속하게된다.

클립그룹, 여기에는 두개의 버튼이 있는데,
첫번째 버튼을 사용하면 플라스크 모양의 마스크나 마스크가 적용된 내용을 선택할 수 있는데,
이경우는 녹색모양입니다.

두번째 내용편집버튼을 클릭하여 녹색모양을 선택하고
마스크를 편집하기 위해 클리핑 패스 편집 버튼을 클릭
속성 패널에서 획 두계를 3pt로 변경하고 획 색상을 클릭하여 가려진 아트웍을 표시해보자

두번째 는
단순한모양으로 모든 콘텐츠에 마스크를 적용해보자

사각형에 적용해야 하기 때문에 사각형을 배경 위로 올린다.

위처럼 사각형안에 배경이 들어가있음.
| 로고제작 (0) | 2020.03.06 |
|---|---|
| 혼합모드 (0) | 2020.03.03 |
| 자유롭게 아트웍 변형 (0) | 2020.03.03 |
| 다양한 방식으로 모양결합 (0) | 2020.03.03 |
| 아트웍 회전 , 반사 및 기울이기 (0) | 2020.03.03 |